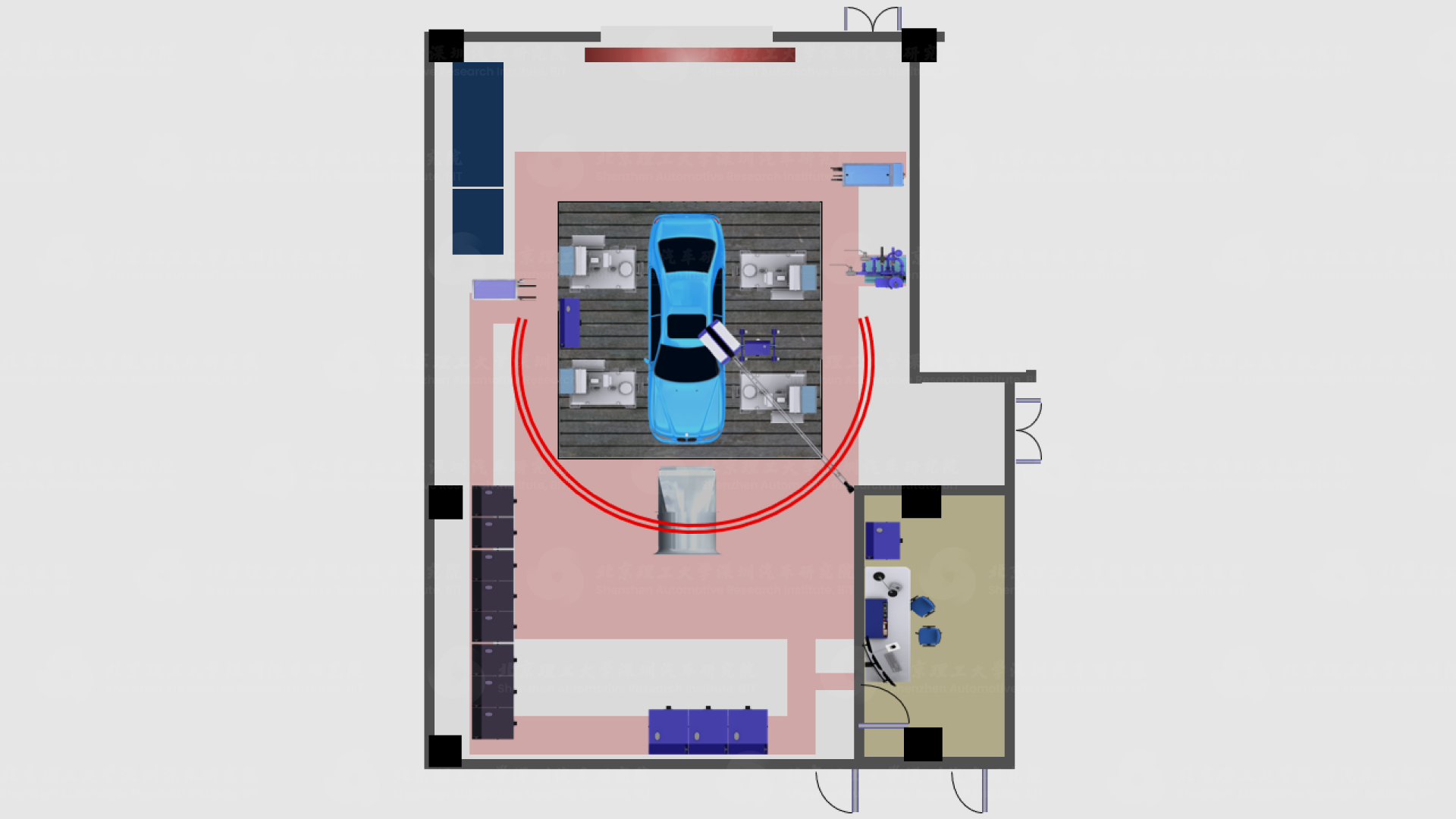
智能网联车辆在环系统是适用于自动驾驶车辆的轴耦合式整车在环测试系统,由场景仿真系统、实时仿真系统、动力总成台架测控系统三大系统及相关建模仿真软件构成。是虚拟环境与真实车辆、真实驾驶员结合的智能驾驶闭环测试系统。
智能网联车辆在环系统是适用于自动驾驶车辆的轴耦合式整车在环测试系统,由场景仿真系统、实时仿真系统、动力总成台架测控系统三大系统及相关建模仿真软件构成。是虚拟环境与真实车辆、真实驾驶员结合的智能驾驶闭环测试系统。
| 设备参数
1. 动力总成台架测控系统
(1)具有四个轮端负载测功机,可选择两轴运行模式,兼具两驱和四驱模式;
(2)轮毂最高转速3000rpm;
(3)单电机额定功率220kW,最大功率330kW(60s);
(4)单电机额定扭矩3250Nm,最大扭矩4875Nm(60s);
(5)最大承重3500kg;
(6)被测车辆形式最大速度≥250 km/h。
2. 动态转向模拟器
支持车轮转角≥45°。
3. 场景仿真系统
(1)支持场景建模、传感器模型接入、智能驾驶算法接入等功能;
(2)支持多GPU渲染,包括道路、建筑、交通参与者等、自由变换各种天气;
(3)支持各类型AD/ADAS摄像头、激光雷达、毫米波雷达、超声波雷达建模及仿真,支持GNSS和IMU建模及仿真;
(4)支持加载OpenDrive文件、运行OpenScenario脚本;
(5)支持与VTD等软件联合仿真。
4. 场景库模块
包含国内外标准法规场景、典型交通事故场景、自然驾驶场景、对抗场景等,支持自定义场景。
5. 实时仿真系统
(1)具备丰富的数字/模拟量输入输出、CAN、LIN、以太网接口;
(2)具备完善的传感器模拟、故障注入等功能;
(3)具备高性能图形工作站、高清晰度投影仪及环幕。
6. 车辆动力学仿真系统
(1)支持底盘与车身、悬架、轮胎、悬置、转向、底盘控制等多模块精细化综合建模仿真与多维度虚拟优化;
(2)支持MATLAB/Simulink联合仿真;
(3)支持通过道路测试数据反向建立车辆动力学模型。
| 应用范围
主要用于智能驾驶汽车及AD/ADAS控制器、底盘域控制器等智驾相关控制器功能开发及测试验证、控制策略验证优化及测试验证等。
| 主要功能
1. AD/ADAS控制器功能整车在环测试及功能安全验证;
2. AD/ADAS控制器硬件在环测试及系统可靠性验证;
3. AD/ADAS控制器软件开发及系统功能测试验证;
4. 底盘域控制功能及性能测试验证;
5. 整车综合能量流测试分析;
6. 整车动力性经济性等常规性能测试。








